DJI主催:P4 Multispectral セミナーシリーズ(第1回)
昨年はDJIのP4Mの共同研究で水稲モニタリングを実施しました。そのDJIからP4Mのセミナーを3月19日にオンライン開催することが決まりました。
今回は第1回目で、基礎編(失敗しない撮影方法・データ処理方法)を取り上げるそうです。下記から登録できますので、P4Mに興味がある方はご参加いただければと思います。
DJI主催:P4 Multispectral
セミナーシリーズ第1回目 基礎編 〜失敗しない撮影方法・データ処理方法〜
2021年3月19日(金) 午後2時~3時
https://register.gotowebinar.
第2回研究会終了
来年度に向けての準備が続き、ブログの更新頻度が少なくなっています...。今回は2月6日に実施した「スマート農業のためのリモートセンシング技術に関する研究会」の内容を紹介します。この研究会は昨年にも実施し,今回で第2回目となります。コロナ禍のためオンライン開催となりましたが、約80名の方々から事前登録がありました。ありがとうございます。
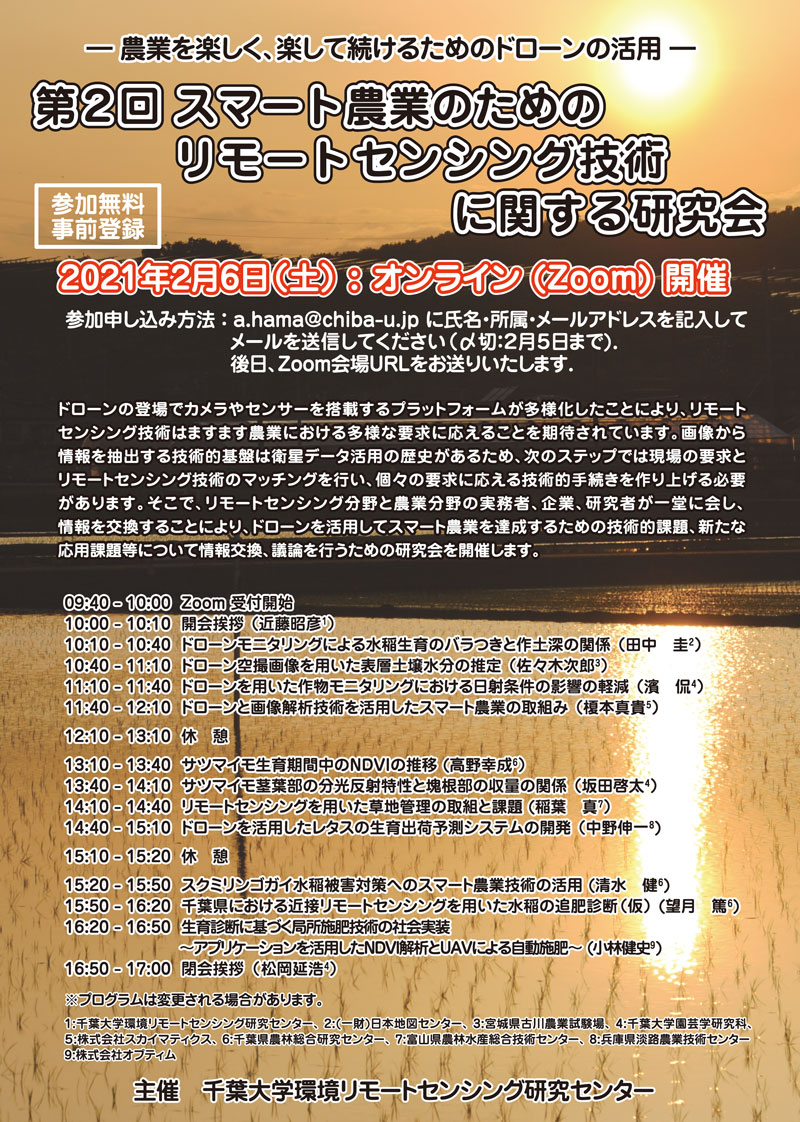
第2回研究会のポスター
この研究会は、 「学会」ではなく、実務レベル・技術的な課題などが議論できる場になればと考えているで、実際のドローンの運用や現場での問題など「学会」とは違った話を聞くことができます。講演には研究者だけではなく、各県の農試関係者、農機具、ドローンやカメラのメーカ、すでに日本各地の農作物をモニタリングしているメーカなどの多くの方々に参加していただきました。
私は、長年のモニタリングによって判明した「圃場内の生育バラつきと作土深の関係」について発表しました。生育のバラつきの要因を格安RTK-GNSSを用いて作成した作土深マップや空中写真判読による地形分類などの視点から探ってみました。
今年はコロナ禍で懇親会ができませんでしたが、来年以降この状況が落ち着くことを願っています。
今年もよろしくお願いします
久しぶりの投稿になります。
1)1月5日に発売される「季刊地域」では兼業農家・多業農家が増殖中!が特集されております。今回はドローンによるモニタリングといった技術面の話ではなく、私が兼業農家になった経緯を書かせていただきました。季刊地域のHPから一部立ち読みができるようになっていますので、興味のある方はこちらまで。
2)今年も3月にドローンを用いた水稲モニタリングのセミナーを実施することになりました。※コロナ禍の状況によって、中止になることもあります。
今までと同様に質疑+休憩を含めて4時間のセミナーとなります。2014年から7年間の成果、モニタリングの運用方法など幅広い内容で講義を行う予定です。また、2020年に共同研究として導入したP4 Multispectral の解析方法および観測結果についても解説する予定となっております。
【日時】:2021年3月8日(月) 12:30-16:30
【場所】:東京・大井町 きゅりあん5階第2講習室
【題目】:ドローンの農業活用とセンシング・モニタリング技術
詳細は以下から(情報機構HP)
https://johokiko.co.jp/seminar_chemical/AC210366.php
追加情報(1月25日追記):セミナー主催会社から講師紹介割引申込の連絡をいただきました。ご希望の方は私宛にご連絡ください。
※1名ご参加の場合 :10,000円引き、2名以上参加の場合 :更に1名につき2,000円引きとなります。
また、セミナーを主催する情報機構からドローンの書籍が販売(2020年11月)されております。504ページとかなり分厚い本となっております。
(農業分野のモニタリングについて執筆しました)
3)令和2年度産「どろーん米」のネット販売分は売り切れとなりました。ありがとうございました。

2020年収量結果
8月は晴れの日が続いたのですが、9月に入ってから集中豪雨が頻繁に襲ってきました。そのため、刈取りは天気予報を見ながら雨の降らない合間を狙って急遽実施しました。
今まで使っていたコンバインは、令和元年東日本台風(台風19号)による水没によって廃車となり、今年からは新型のコンバインになります。初運転となるので、ヤンマーの担当者さんから操作のレクチャーを受けました。また、実際に刈り取る圃場でも丁寧に教えていただきました。担当者さんも言っていたのですが、梅雨の長雨による不十分な中干し、刈取り前の豪雨で土壌を乾燥することができないといった・・・コンバインの操縦にはハードな土壌状態での刈取りとなりました。

新しいコンバインでの刈取り
今年の出穂期までの積算日照時間は、下図のようにモニタリングを始めてから最も低い値を示しています。そのため、日照不足であった2019年の収量予測パラメータ(日照不足用)を用いて収量を予測しました。

(アメダス:鳩山地点を用いて作成)
2014~2020年の移植日から収穫日まで積算日照時間
それでは、1ヶ月前に投稿した収量予測(予測値:1464 kg、474kg/10a)の答え合わせです。
試験サイト全体の精玄米収量 :1491 kg(483kg / 10a)
収量予測との誤差 約27kg (1.8%)
今年は、ほぼほぼピッタリの予測ができました(ニアピン賞ぐらい)。また、過去の結果から幅を持たせて予測した1464~1512kg(474~489kg/10a)の間には収まりました。ドローン水稲モニタリングを始めてから7年目になるので、いろいろな知見から対応できつつあります。

ドローン運用開始からのコシヒカリ収量(10a当たりの精玄米収量)およびタンパク質含有率の結果
今年はドローン水稲モニタリングを始めて歴代2位の収量となりました。日照時間から見ると2020年は2019年と同様だったので、10a当たり465kgの収量でもおかしくなかったのですが、農閑期に行った土づくりの見直しが功を奏したのかも知れません。
倒伏警報発令
今年は8月5日に出穂期を迎えました。既に収量予測を紹介しましたので、次は倒伏しやすいコシヒカリの倒伏リスク診断結果(2020年)を記事にします。おおよそ出穂14日前のモニタリングデータを利用して倒伏リスク診断を行うのですが、今回は空撮スケージュールが合わず、18日前のデータから約4.8万株についてリスク診断を行いました。倒伏リスク診断の計算方法はこちらに掲載しています。

倒伏リスク診断マップ(2020年)
倒伏リスク診断の結果、橙~赤色は倒伏する確率が高い株で、寒色系は倒伏する確率が低い株になります。圃場の南西部と南中部の一部で倒伏リスクが高くなっています。南西部は、2019年の台風19号によって倉庫に保管してあった肥料などが浸水してまい、それらを廃棄した場所になります。この影響が生育にも表れていると考えられます。また、南中部は今年から始めたある土づくりの方法によって草丈が高くなったかもしれません。※ある土づくりの方法については後日紹介予定です。
高い確率で倒伏すると予想できたので、何らかの対応をしなければいけません。特に、稲穂が地表面の水に着いてしまう状態だけは避けなければなりません。
登熟後期に入ってから、だんだんとイネが傾き始めてきました。この時期に豪雨や強風に襲われると一気に倒れてしまいます。幸い、梅雨明けから天気のいい日が続いていますが(気温は最寄りのアメダス地点:鳩山では40℃越えの日も・・・)、いつ豪雨や強風が来てもいいように対策を施しました。

イネ4株を麻糸でまとめて倒伏対策
狭い範囲のイネに対して施しましたが、意外と作業時間はかかりました。草丈の生育ムラがなければやらなくてもいい作業なのですが・・・均一に栽培する難しさを今年も実感しました。

上空から撮影した倒伏対策をしたイネ
稲刈りまであと少し・・・倒伏しないことを祈る日々です。
サンシェード
晴れた日は太陽光が強く、タブレットなどのモニター画面は見にくくなります。新しいPhantomシリーズは、iPadなどのデバイスを取り付けて操縦するのが前提なので、画面から得る情報は重要です。
対策としては、画面の明度を上げる、太陽光の当たらない位置に移動するなどがあります。また、サンシェード(日よけ)で外部からの光を遮光する方法もあります。既に各社から様々なデバイスに対応したサンシェード(2000~3000円程度)が市販されていますが、iPad Pro用のサンシェードは種類が少なく、価格も高めとなっています。
そこで、100均で売られている材料でiPad Pro用のサンシェードを自作してみました。
【材料】
・カラーボード(黒)、マジックテープ(黒)、輪ゴム(太目)、テープ(黒)

サンシェードの部品
写真のように、iPadの大きさに合うようにカッターで3枚(上面、側面×2)に切ります。上面の左右の端にはそれぞれマッジクテープを貼ります。側面にもマジックテープと輪ゴムをそれぞれ貼り付けます。
あとは、iPadに側面から上面の順番に取り付けていきます。

簡易的なiPad Pro用サンシェード
多少、隙間から光が漏れてきますが、サンシェードが無い時と比べると画面は大幅に見やすくなります。
P4Mによるモニタリング指標の動画撮影
2020年8月6日にP4M(P4 Multispectral)ファームウェアのバージョンアップがありました。今回のバージョンアップによる主な追加機能は、ライブビュー画像を動画として記録できるところです。
それまでは、P4Mが撮影している画像をiPad上でリアルタイムに表示(RGBやNDVIなど様々なモニタリング指標の選択が可能)するだけでした。そこに、今回は動画として記録できるようになりました。
さっそく、RGB・NDVI・GNDVI・NDREを動画で撮影してみました。※今回のバージョンアップで、表示できるカラーの種類の追加やカラースケールの範囲設定ができるようにもなっています。
P4Mによるモニタリング指標の動画撮影
動画機能を試した結果、動画でも生育状況の違いを詳細に判断できることを確認できました。また、モニタリングによる解析を行うときには静止画が最適なのですが、現場でのデモやプレゼンの資料作成には静止画にはない動画の魅力を感じました。
出穂期・収量予測(2020年)
今年も昨年と同様に梅雨の長雨で梅雨明けが、平年より11日(昨年より8日)遅い8月1日となりました。梅雨明けが遅かったので、試験サイトでも2日遅い(5年間の平均)8月5日に出穂期を迎えました。

イネの開花(2020年8月5日撮影)
2014年からの水稲モニタリングの記録から、2020年は2016、2019年の積算日照時間・積算温度に近い傾向となっています。特に2020年の積算日照時間は過去のデータと比べると短く、最も長かった2018年の58%となっています。2020年の積算温度は1775.8℃と平均に近い値を示しました。これらの結果から、この地域におけるコシヒカリの出穂期までの積算温度の目安は1700℃ぐらいだと考えられます。
| 年 | 移植日 | 出穂期 | 日数 | 積算日照時間(h) | 積算温度(℃) |
| 2020 | |||||
| 2019 | |||||
| 2017 | 5月21日 | 7月30日 | 71 | 399.8 | 1697.6 |
| 2016 | 5月21日 | 8月4日 | 76 | 381.3 | 1774.5 |
| 2015 | 5月23日 | 8月3日 | 73 | 427.8 | 1742.1 |
| 2014 | 5月24日 | 8月3日 | 72 | 400.4 | 1714.0 |
| Average | 5月21日 | 8月1日 | 72.0 | 387.2 | 1736.1 |
気象データは最寄りのアメダス地点:鳩山を用いて算出
出穂期のモニタリングも終えたので、2020年収量予測マップを作成してみました。今年は2019年に近似しているので、2019年の収量パラメータを使ってみたところ、以下のような結果となりました。

試験サイト全体の玄米収量予測 (ドローン): 1464 kg
10aあたり