SfM-MVS
果樹
先日のセミナーで果樹のせん定が重要だということを知りました。
果樹のせん定は、日当たりや風通しをよくすることで病気の発生を防ぎ、収量や品質の安定性を確保する大切な技術です。
ただし、せん定は誰もがすぐにできる作業ではありません。まずは、ベテラン農家さんのせん定技術を見ることから始まります。
今回はSfM-MVS技術でイチジクの樹(自宅近くにある)を3Dモデルにすることができるか試してみました。

自宅近くにあるイチジクの樹
ドローンを用いた上空からの撮影及びポールカメラ撮影ではなく、地上から樹を中心に撮影を行いました。
今までの経験から、細い枝等はモデルにならないと思っていましたが、意外と上手く作成することができたのに驚きです。

撮影位置の特定とモデル

イチジクの樹の点群データ
どのぐらい細い枝まで対応できるかは今後の課題です。また、果樹に適した撮影方法を見つけないといけないかもしれません。

画像をクリックすると別サイトが開きます。
将来的には高精度の果樹の構造モデルを3Dプリンターで出力することで、新規就農者はせん定の技術を磨くことができると思います。さらに、着色できる3Dプリンターを利用することで、ベテラン農家さんが持つ高度なノウハウをより習得しやすくなるかもしれません。
【手法】3Dモデル作成(SfM-MVS処理)
【手法】ドローン飛行設定で紹介したように、地図を作成する場合の撮影にはルールがあります。隣接する写真の約60%以上が重複するように撮影します。重複部分があることで、撮影した地表面を立体的に見ることができるようになります。
数年前から個人でも3Dモデルを作成できるソフトがいくつか登場しました。例えば、PhotoScan(Agisoft)やPix4Dmapper(Pix4D)などの有料ソフトの他に、無料のVisualSFMがあります。私は操作方法や価格などを検討した結果、PhotoScanを使用しています。
※PhotoScanを購入する際にはProfessional Edition を選択してください。Standard Edition ではオルソ画像・DSMを出力できませんので注意してください。
 フローチャート(3Dモデル作成)
フローチャート(3Dモデル作成)
1) 撮影画像
撮影カメラにはRicho GRおよびCanon S110(近赤外改造カメラ)を使います(2015年以降)。30a程度の圃場であれば、上空50mを約6分の飛行時間で300枚程度撮影できます(Richo GRでインターバル1秒設定)。この撮影した画像のうち、ブレの小さい画像のみを使用します。PhotoScanでは、画像の品質を 「0~1」で 数値することができます。高品質の画像は1に近い数値を示します。反対に、ブレの大きい低品質の画像は0に近くなります。


左:高画質(0.92) 右:低画質(0.65)
(2016年7月21日撮影 Richo GR)
基準点(GCP:Ground Control Point)の位置座標設定
3Dモデルに位置情報を付与するために、撮影した画像の基準点に位置座標を設定します。下図は上空50mから撮影した基準点+対空標識です。

PhotoScanでの基準点設定
2015年以降はTS測量の計測値を使用しているので、高精度な3Dモデルが作成できます(誤差は数cm)。
2)SfM-MVS 処理
撮影した画像をPhotoScanで処理していくのですが、作業工程のほとんどが自動化されているので、簡単に3Dモデルを作成することができます。数時間程度で処理が完了するので、観測した当日にはモニタリング結果を手にすることができます。

SfM-MVS 処理の結果
3)3Dモデル(オルソ画像・DSM)
位置座標を付与した3Dモデルからオルソ画像・DSMを出力することができます。モニタリングデータの解析では、生育状況の判断にオルソ画像、倒伏リスク診断にDSMを使用します。
可視光域、近赤外域で撮影後、作成したオルソ画像・DSMはGIS(Geographic Information System:地理情報システム)で解析し、管理していきます。GISは地図を表示するだけではなく、解析結果などを地図として可視化することができ、生育状況の判断に使用します。
フリーソフトの「QGIS」で水稲モニタリングの解析を十分に行うことができます。

QGISによるモニタリング結果の可視化
【手法】ドローン飛行設定
ドローンによる空撮手順の一例を紹介します。
モニタリングや地図作成など定期的かつ効率的に撮影するには、ドローンの自律飛行機能は重要になります。
私がドローンに触れたときは、上記の目的を満たす機体は僅かでした。
※2012年発売のPhantom1(DJI社)は電波法によって制限されていました。現在のPhantomシリーズはPCまたはタブレットを通して、自律飛行は可能となっています。
そこで、当時でも自律飛行が可能なオープンソース系のフライトコントローラを搭載したZion EX700を購入しました。
ここでは、飛行コースや機体のセッティングを行うフリーソフトの「Mission Planner」を紹介します。
撮影カメラ
【2014年】
オルソ画像・DSM
・可視光域:Nikon AW1

Nikon AW1(シャッター部分には小型サーボを設置)
NDVI
・近赤外域:GoPro3×2台

GoPro3を用いた簡易型近赤外カメラ
左側:近赤外域(光吸収・赤外線透過フィルターをレンズ前に設置)、右側:可視光域
【2015年以降】
2014年に判明した問題点を改善するために、撮影カメラを以下のものに変更しました。
オルソ画像・DSM
・可視光域:Richo GR
Richo GR
RICHO GRは、これまでに試したカメラの中で空撮に適したカメラです。重量が245gと軽量でありながら、撮像素子(23.7mm×15.7mm)が大きいので、画質の高い画像を撮影できます。また、レンズの歪みも小さいので、3Dモデル作成にも適しています。私がお勧めするカメラの一つです。
NDVI
・近赤外域:Canon S110(近赤外域を撮影できるように改造)

改造Canon S110(近赤外域撮影用)
1) 撮影計画
Mission Plannerでは、撮影カメラの仕様や飛行高度などを入力することで、最適な飛行経路を設定できます。 下図は週1間隔でモニタリングを行っている飛行コースになります。地面効果の影響によって機体が不安定になりやすい離着陸時は、マニュアルで操縦を行い、ある程度上空に到達したら、自律飛行に切替えます。

飛行コース(黄線:設定コース 緑点:ウェイポイント)
※対地高度:50m サイドラップ率:70%
2) 基準点設置
撮影画像から作成する3Dモデルに位置情報を付与するために、基準点(GCP:Ground Control Point)を設置します。高精度の3Dモデルを作成したい場合は,トータルステーション(TS)や人工衛星を用いた測量(RTK-GNSS測量)が望ましいです。多少精度が落ちますが、地理院地図の緯度経度座標及び標高値を使用することもできます。
2014年は地理院地図の座標を用いていましたが、高精度な3Dモデルが欲しくなったので、トータルステーションで圃場四隅を計測しました。2015年以降はTS測量で取得した値を使用しています。

トータルステーション測量(2015年)
基準点は対地高度50mからでもが判読できるように設置します。材料はホームセンターで揃えることができます(約1,200円)。
基準点用の杭:テント用のプラスチック製ペグを使用(ホームセンターで購入:1本約100円×4本)
対空標識:直径30cmのプラスチック製の漬物落し蓋を使用(ホームセンターで購入:1枚約200円×4枚) ※判読しやすいように、油性マジックで塗装。

基準点+対空標識
3)飛行・撮影
ドローン撮影の基本は「下手な鉄砲も数撃てば当たる」です。無駄になっても構わないので、枚数を多く撮影していきます。機体の揺れなどによってピンボケが撮影されこともあるので、Richo GRでは最短インターバルの1秒で撮影します。Canon S110も同様に最短のインターバルで撮影します。ただし、Canon S110は標準機能にはインターバル撮影がないので、ロシアン・ファーム(ロシアで開発されたソフトを使った裏技)で機能を追加します。
3Dモデル作成には、ピンボケの撮影画像などは取り除きます。

上空から撮影中
次回、3Dモデル作成について説明します。

試験サイト周辺の3Dモデル
肥料混ぜ込み&ドローン計測
前日に粒状の肥料を散布したので、トラクターを使って土に混ぜ込みを行いました。今回は作業深度は浅めの設定です。
トラクタの駆動時間は約2時間(約3反)でした。
その後、ドローンを用いてDSM計測を実施しました。圃場をマップ化することで、均平化作業の状況を確認できます。
ドローンの撮影時間は約5分、DSM・オルソ画像作成時間は約1時間程度です。

均平化
2月なのに、日中は20度越え...密閉されたトラクタの運転席では額から汗が垂れるほど暑くなりました。
ドローンは水稲の生育を見るだけではなく、測量にも使えます.今回はトラクタで作業をする前にドローンをオートパイロットで飛ばし、圃場の高さを計測しました.低空から撮影した画像データはSfM-MVSソフトを使って、cm単位の高さデータを取得できます。
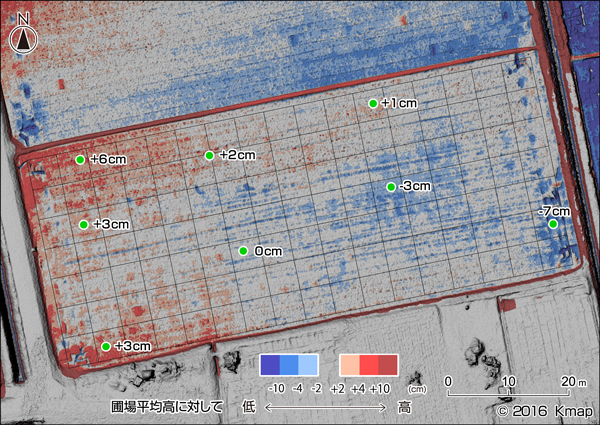
やはり、圃場は均平ではなく、圃場の西側が高く、東側で低くなっていることがわかりました。
この地図を資料として、高低差をトラクターを使ってなるべく均平になるように作業をしました。1回の作業では均平にはならないので、代かきまでに数回実施する予定です。
